Operator Training Simulator
In the process industry, represented by the chemical, petrochemical and petroleum refining, sites that were constructed 30 years ago during periods of high growth are entering a period of generational change. As an increasing number of operators that are familiar with these sites are retiring, the early training of rookie operators and the transmission of the knowledge of veteran operators have become pressing issues. Furthermore, opportunities to perform transient operations are becoming rarer due to advancements that have allowed extending time intervals between periodic maintenance and automation for stable operation, and there is perhaps even a danger that operation is increasingly perceived as a black box. Within this context, companies are making efforts to improve operation skills by use of operator training simulators (hereafter OTS) that perform operation training by use of virtual plants built with simulators.
Classification of Operation Training
A simple and familiar example of a training simulator is a flight simulator. In the case of an OTS, parallels can be drawn between the person performing the operation (the operator versus the pilot), the device that is operated (the virtual plant versus the virtual airplane) and the goal which in both cases is to perform operation training in order to acquire a technical expertise. OTS can be classified in the following categories as shown in the table below.
| Planned Events | Unplanned Events | |
|---|---|---|
| Normal
Operations |
Normal Condition Training
・Routine operations (load and set value changes) ・Routine switching operations (e.g. brand switching) |
Abnormal Condition Training (Malfunctions)
・Equipment/Instrument failures |
| Exceptional Operations | Transient State Training
・Startup/Shutdown operations ・Switching feeds, cleaning instruments |
Emergency Training
・Emergency shutdown (ESD) operation ・ESD in another plant |
Normal Condition Training
In normal continuous operation, this is training for operating condition transitions of such as load changes, equipment switching, and brand switching of polymer plants.
Abnormal Condition Training
Process anomalies, instrument and equipment failures and incorrect operations are called malfunctions. Since abnormal conditions can easily be created in the simulator, malfunctions can deliberately be caused to happen so as to perform training for taking corrective actions. Efforts can also be made to reproduce on the simulator troubles (abnormal conditions) that actually occurred in the past in the plant, so as transmit safe operation techniques.
Transient State Training
This is operation training required to bring a continuous plant from the stopped state to the normal steady operation condition (startup) or conversely from the normal steady operation condition to the stopped state (shutdown). In recent years, as the opportunities to perform such operations have become scarcer due, for example, to the decrease of periodic repairs, it is useful to have a simulator to rehearse these procedures in advance.
Emergency Training
This is training performed in response to utility outages (such as steam, cooling water, or power) or in response to trouble in another plant closely related to the operation.
Operator Training Simulator Functions
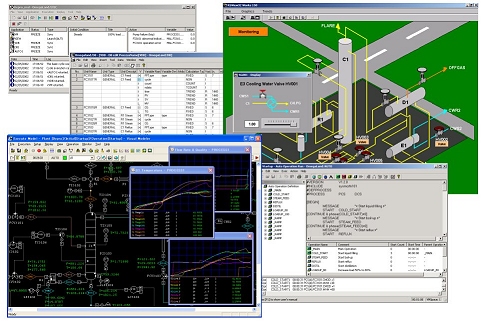
If the OTS is considered as each of its separate function modules, it includes functions such as the plant simulator that implements the virtual plant model, GUI (graphical user interfaces) which provide a variety of graphical functions, calculation and data processing, databases for historical data storage, mechanisms for generating malfunctions and for performing automatic operations, mechanisms for carrying out training evaluation and replay, and DCS connection functions.
Plant Simulator
At the heart of the OTS, the plant simulator implements a virtual plant that faithfully recreates a real plant on a computer. In order to achieve this, large scale plant model calculations must be performed with high accuracy and in real time. In addition, in order to perform startup training, the plant model is required to cover a wide range of operation conditions, from the plant empty conditions up to full-load continuous operation.
Execution Control Functions
Execution control functions such as run/freeze, snapshot/stepback, and changing time scales can be carried out. During the execution of a dynamic simulation, “run” is the state in which training is proceeding, and “freeze” is the state in which the execution is temporarily stopped. A “snapshot” is the action of temporarily saving a state in the course of training, and a “stepback” the action of returning to the state when a snapshot was taken. This function makes it possible to return to the same state to repeat a training sequence again and again. A state taken as snapshot can also be saved as an initial condition file.
The time scale change allows varying the simulation speed by factors such as 1/8, 1/4, 1/2, 2, 4, or 8 times real time. Changing the time scale allows accelerating the execution of time-consuming phenomena, or slowing down the execution of rapid phenomena to examine them more carefully.
Initial Condition Save Function
The beginning of training, i.e. the state when simulation is started, is called the initial condition. For example, when training is to be carried out for handling startup operations, the initial condition is the state when the startup begins; when training is to be carried out after an abnormal plant condition has occurred during steady operation, the initial condition is the state of steady operation. These initial conditions are saved as files that contain the states of each module that are part of the OTS configuration. At the beginning of training, an initial condition is loaded and setup from these files. Also, it is possible to save conditions (including snapshots) in the course of a training session to continue reusing them at a later point in time.
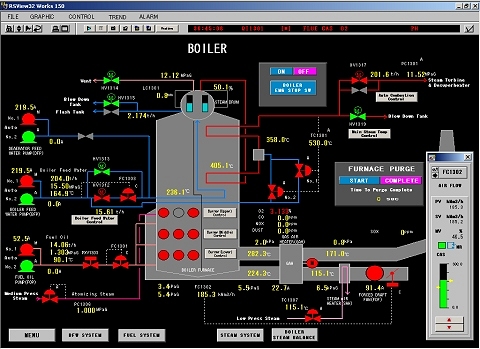
DCS Emulation Function
The DCS emulation type reproduces an operator console by use of a graphic function display. Displays such as graphic operation displays, instrument control setting displays and trend graphs, are simulated.
Field Operation Simulation Function
Actual plant operations include field operations in addition to DCS operations. The scope of these operations may include, for instance, opening and closing hand valves, turning rotating equipment on and off, verifying field equipment indications, or simulating a field lab. In certain cases, sounds and pictures may also be used to improve the likeliness of the field operations.
Malfunction Functions
These functions are used to deliberately generate abnormal plant conditions state or equipment failures in order to train operators to face these problems. Malfunctions include, for instance, instrument and process anomalies, equipment failures, incorrect operations, and external disturbances. Unit variable values of the dynamic simulator are intentionally modified to create situations that cause abnormal conditions.
Automatic Operation Functions
The automatic operation functions are provided to implement training based on a series of procedures following a certain storyline (scenario function), or training with procedures created by leaving out only the part an operator should execute (karaoke function). Moreover, these automatic operation functions can be utilized even for the execution of malfunctions, or when multiple operations are involved, variables are controlled over a certain period of time, or processing is selected depending on process conditions.
Replay Evaluation Function
This function can be used to reproduce operations as they were performed after the training is completed. Instructors can look back on the training together with the trainees, verify the operations and provide guidance. In addition, operation record logs and operation event logs can be output to files.
DCS Connection Function
When an actual DCS connection type is used, a DCS connection function is required. Tags on the tag list are acquired from the DCS and linked (marshaled), data is exchanged periodically, and execution control commands are transferred to the DCS side.
Self-Training Function
A trainee can perform training automatically at any time by selecting a given training scenario, and may also check the list of results, and leave records of the training.
Operator Training Simulator Configurations
OTS implementation types comprise a type that connects to the actual DCS and uses the same model for training (actual DCS connection type), and a type that simulates the DCS operation displays and DCS control logic (DCS emulation type). Both of these types can be implemented in OmegaLand.
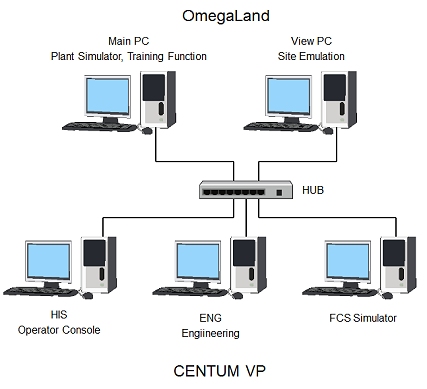
Actual DCS Connection Type
With the actual DCS connection type, the onsite control logic, its parameter values and the DCS operator console are used as is. The advantage of this configuration is to provide a realistic and seamless sense of operating real devices, but accordingly this is a large scale and ambitious configuration. The following figure shows an example of a system configuration connected with the Yokogawa CENTUM VP. In the most recent systems, it is also possible to use the actual applications of the Yokogawa safety instrumentation system (Prosafe-RS) in the same manner as the DCS.
DCS Emulation Type
The DCS emulation type is a compact configuration that reproduces the control logic as a Visual Modeler control model, and that imitates the GUI of the DCS by use of graphic displays. This method is suitable for understanding a process and verifying operating procedures.